BGDA Lecture - Development of the Embryo/Fetus 1: Difference between revisions
mNo edit summary |
mNo edit summary |
||
| Line 112: | Line 112: | ||
'''Sertoli cells''' (support cells) '''Interstitial cells''' or Leydig cells (produce hormone) | '''Sertoli cells''' (support cells) '''Interstitial cells''' or Leydig cells (produce hormone) | ||
| File:Seminiferous tubule cartoon.jpg|400px]] | | [[File:Seminiferous tubule cartoon.jpg|400px]] | ||
|} | |} | ||
===Female=== | ===Female=== | ||
The ovaries have two functions. | The ovaries have two functions. | ||
# produce the female gametes or '''oocytes''' | # produce the female gametes or '''oocytes''' | ||
| Line 129: | Line 128: | ||
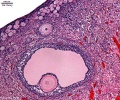
In an adult human female the development of a primordial follicle containing an oocyte to a preovulatory follicle takes in excess of '''120 days'''. | In an adult human female the development of a primordial follicle containing an oocyte to a preovulatory follicle takes in excess of '''120 days'''. | ||
[[File:Human_ovary_follicle_development.jpg|600px]] | |||
Human ovary follicle development | |||
::'''Ovarian Follicle Stages:''' [[P#primordial follicle|primordial follicle]] - [[P#primary_follicle|primary follicle]] - [[S#secondary_follicle|secondary follicle]] - [[T#tertiary_follicle|tertiary follicle]] - [[P#preovulatory_follicle|preovulatory follicle]] | ::'''Ovarian Follicle Stages:''' [[P#primordial follicle|primordial follicle]] - [[P#primary_follicle|primary follicle]] - [[S#secondary_follicle|secondary follicle]] - [[T#tertiary_follicle|tertiary follicle]] - [[P#preovulatory_follicle|preovulatory follicle]] | ||
Revision as of 16:18, 5 May 2014

Introduction

In medicine foundations you were given a broad overview of human development. Now in BGDA we will be working through the human development process in more detail, focussing on key events.
- Begin by reviewing the recent Foundations Lecture and Practical.
- This BGDA lecture covers conceptus development from fertilization to implantation to trilaminar embryo formation.
- The lecture will also introduce early fetal membranes and placentation.
- Currently being updated for 2014 (this notice removed when completed).
- Lecture Archive: 2013 Lecture | 2012 | 2010 | 2008
| Textbooks | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
 UNSW Embryology
The Developing Human: Clinically Oriented EmbryologyCitation: The Developing Human: Clinically Oriented Embryology 8th ed. Moore, Keith L; Persaud, T V N; Torchia, Mark G Philadelphia, PA : Saunders/Elsevier, c2011. (links only function with UNSW connection)
Larsen's Human HmbryologyCitation: Larsen's human embryology 4th ed. Schoenwolf, Gary C; Larsen, William J, (William James). Philadelphia, PA : Elsevier/Churchill Livingstone, c2009. (links only function with UNSW connection)
BGDA Practical Classes
| ||||||||||||
Human Reproductive Cycle
- Meiosis in gonad produces haploid gametes (egg and sperm)
| Female | Male |
|---|---|
|
|


Gametogenesis
Male
The testes have two functions.
- produce the male gametes or spermatozoa
- produce male sexual hormone, testosterone (internal and external genitalia, sex characteristics)

Historic testis drawing
Child Seminiferous tubule

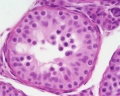
Adult Seminiferous tubule showing spermatozoa developmental stages

Seminiferous tubule cross-section and supporting cells
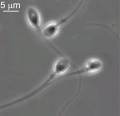
Human spermatozoa





Human spermatozoa take about 48 days from entering meiosis until morphologically mature spermatozoa.
Sertoli cells (support cells) Interstitial cells or Leydig cells (produce hormone) |

|
Female
The ovaries have two functions.
- produce the female gametes or oocytes
- produce female hormones, estrogen and progesterone (secondary sex characteristics, menstrual cycle)
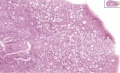
infant ovary
overview of ovary
three stages of follicle development

primary follicle

secondary follicle





In an adult human female the development of a primordial follicle containing an oocyte to a preovulatory follicle takes in excess of 120 days.

Human ovary follicle development
- Ovarian Follicle Stages: primordial follicle - primary follicle - secondary follicle - tertiary follicle - preovulatory follicle
Follicle cells (support cells) Theca cells (produce hormone)
- Links: Spermatozoa Development | Oocyte Development | MBoC - Figure 20-18. Influence of Sry on gonad development | Endocrinology - Comparative anatomy of male and female reproductive tracts
Fertilization

- Oogenesis - 1 gamete produced/meiosis + 3 polar bodies, meiosis is slow, 1 egg produced and released at ovulation
- Spermatogenesis - 4 gametes produced/meiosis, meiosis is fast, 200-600 million sperm released at ejaculation
![]()
![]()
Fertilization Site
- Fertilization usually occurs in first 1/3 of uterine tube (oviduct, Fallopian tube)
- Fertilization can also occur outside uterine tube associated with Assisted Reproductive Technologies (IVF, GIFT, ZIFT...) and ectopic pregnancy
- The majority of fertilized eggs do not go on to form an embryo
Fertilization - Spermatozoa
- Capacitation - alteration of the spermatozoa metabolism and surface proteins
- Sperm Binding - zona pellucida protein ZP3 acts as receptor for sperm
- Acrosome Reaction - exocytosis of acrosome contents (Calcium mediated) MBoC - Figure 20-31. The acrosome reaction that occurs when a mammalian sperm fertilizes an egg
- enzymes to digest the zona pellucida
- exposes sperm surface proteins to bind ZP2
- Membrane Fusion - between sperm and egg, allows sperm nuclei passage into egg cytoplasm
Fertilization - Oocyte
- Membrane Depolarization - caused by sperm membrane fusion, primary block to polyspermy
- Cortical Reaction - IP3 pathway elevates intracellular Calcium, exocytosis of cortical granules MBoC - Figure 20-32. How the cortical reaction in a mouse egg is thought to prevent additional sperm from entering the egg
- enzyme alters ZP3 so it will no longer bind sperm plasma membrane
- Meiosis 2 - completion of 2nd meiotic division
- forms second polar body (a third polar body may be formed by meiotic division of the first polar body)
![]()
![]()
Week 1 and 2


Week 2 Implantation
![]()
![]()
Normal Implantation
- Uterine body
- posterior, anterior, superior, lateral (most common posterior)
- inferior implantation - placenta overlies internal os of uterus Placenta Previa
Abnormal Implantation

- Ectopic Sites
- external surface of uterus, ovary, bowel, gastrointestinal tract, mesentery, peritoneal wall
- If not spontaneous then, embryo has to be removed surgically
- Uterine - tubal pregnancy (most common ectopic)
Early Placenta
- interaction between implanting conceptus and uterine wall (endometrium)
- The uterine lining following implantation (Decidua)
- forms 3 distinct regions, at approx 3 weeks
- Decidua Basalis - implantation site
- Decidua Capsularis - enclosing the conceptus
- Decidua Parietalis - remainder of uterus
- uterine cavity is lost by 12 weeks
Week 3 Gastrulation



Gastrulation, (Greek = belly) means the formation of gut, but has been used in a more looser sense to to describe the formation of the trilaminar embryo. The epiblast layer, consisting of totipotential cells, derives all 3 embryo layers:endoderm, mesoderm and ectoderm. The primitive streak is the visible feature which represents the site of cell migration to form the additional layers. Historically, gastrulation was one of the earliest observable morphological event occurring in the frog embryo.
- primitive node - region in the middle of the early embryonic disc epiblast from which the primitive streak extends caudally (tail)
- nodal cilia establish the embryo left/right axis
- axial process extends from the nodal epiblast
- primitive streak - region of cell migration from the epiblast layer forming sequentially the two germ cell layers (endoderm and mesoderm)

![]()
Notochord

The notochord is a structure which has an early mechanical role in embryonic disc folding and a major signaling role in patterning surrounding embryonic tissue development. This signaling role patterns many different tissues (neural plate, neural tube, somites, endodermal organs). It has its own sequence of development from a primitive axial process and is a developmental feature not present in the adult anatomy.
![]()
- axial process an initial epiblast hollow epithelial tube which extends in the midline from the primitive pit, cranially in the embryonic disc (toward the oral membrane).
- neuroenteric canal is a transient communication between the amnionic cavity and the yolk sac cavity formed by the axial process.
- notochordal plate forms from the axial process merging with the endoderm layer.
- notochord forms from the notochordal plate which then separates back into the mesoderm layer as a solid column of cells lying in the midline of the embryonic disc and running rostro-caudally (head to tail).
- An alternate name for the notochord is "axial mesoderm".
Somitogenesis


Mesoderm means the "middle layer" and it is from this layer that nearly all the bodies connective tissues are derived. In early mesoderm development a number of transient structures will form and then be lost as tissue structure is patterned and organised. Humans are vertebrates, with a "backbone", and the first mesoderm structure we will see form after the notochord will be somites.
Coelom, meaning "cavity", and major fluid-filled cavities can be seen to form both within the embryo (intraembryonic coelom) and outside the embryo (extraembryonic coelom). The intraembryonic coelom is the single primitive cavity that lies within the mesoderm layer that will eventually form the 3 major anatomical body cavities (pericardial, pleural, peritoneal).
trilaminar embryo
mesoderm regions

somite coelom
neural tube and neural crest




Somite initially forms 2 main components
- ventromedial- sclerotome forms vertebral body and intervertebral disc
- dorsolateral - dermomyotome forms dermis and skeletal muscle

paraxial mesoderm

early somite

sclerotome and dermomyotome

dermatome and myotome

epaxial and hypaxial muscles





![]()
Week 4 Neuralation
|




![]()
![]()
Ectoderm - 2 parts
- midline neural plate (columnar cells)
- lateral surface ectoderm (cuboidal cells)
- sensory placodes
- epidermis of skin, hair, glands, anterior pituitary, teeth enamel
Neural Plate

![]()

- extends from buccopharyngeal membrane to primitive node
- forms above notochord and paraxial mesoderm
- neuroectodermal cells
- broad brain plate
- narrower spinal cord
- 3 components form: floor plate, neural plate, neural crest
Cardiogenesis



The Human Heart from day 10 to 25 (scanning electron micrograph)
- forms initially in splanchnic mesoderm of prechordal plate region - cardiogenic region
- growth and folding of the embryo moves heart ventrallly and downward into anatomical position
- week 3 begins as paired heart tubes that fuse to form single heart tube
- begins to beat in Humans- day 22-23
Blood Islands

- 2 populations of cells
- peripheral- form endothelial cells that form the lining of all blood vessels
- core- form blood cells (haemocytoblasts)
- all vessels (arteries and veins) appear initially the same
Blood Formation

- blood formation from stem cells occurs initially in the extraembryonic mesoderm of the yolk sac
- then later (week 5) throughout embryonic mesenchyme
- blood stem cells then migrate into the liver
- then spleen, bone marrow, lymph nodes
Red Blood Cells
The only cells in the blood are nearly entirely fetal red blood cells (RBC).
These red blood cells differ from adult red blood cells in:
- often remaining nucleated
- contain fetal haemoglobin - has different oxygen and carbon dioxide binding characteristics
- Links: Basic Cardiac Embryology
Early Placentation
![]()


The trophoblast layer has now differentiated into two morphologically distinct cellular layers.
- Syncitiotrophoblasts - form a multinucleated cytoplasmic mass by cytotrophoblast cell fusion and both invade the decidua and secrete hCG
- Cytotrophoblasts - form a cellular layer around the blastocyst, proliferates and extends behind syncitiotrophoblasts
Early Utero-Placental exchange - transfer of nutrition from maternal lacunae filled with secretions from uterine glands and maternal blood from blood vessels. The development of trophoblast villi extending into the uterine decidua.
There are three stages of villi development:
- Primary Villi - cytotrophoblast
- Secondary Villi - cytotrophoblast + extraembryonic mesoderm
- Tertiary Villi - cytotrophoblast + extraembryonic mesoderm + blood vessels
Primary chorionic villi
Tertiary chorionic villi

Placenta anchoring villi


There are two main types of early villi:
- Anchoring villi - attached to decidua
- Floating villi - not attached to decidua, floating in maternal lacunae.
Textbooks

|
Moore, K.L. & Persuad, T.V.N. (2008). The Developing Human: clinically oriented embryology (8th ed.). Philadelphia: Saunders. |

|
Schoenwolf, G.C., Bleyl, S.B., Brauer, P.R. and Francis-West, P.H. (2009). Larsen’s Human Embryology (4th ed.). New York; Edinburgh: Churchill Livingstone. |

|
Hill, M.A. (2012) UNSW Embryology (12th ed.). Sydney:UNSW. |
BGDA: Lecture 1 | Lecture 2 | Practical 3 | Practical 6 | Practical 12 | Lecture Neural | Practical 14 | Histology Support - Female | Male | Tutorial
Glossary Links
- Glossary: A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z | Numbers | Symbols | Term Link
Cite this page: Hill, M.A. (2024, April 23) Embryology BGDA Lecture - Development of the Embryo/Fetus 1. Retrieved from https://embryology.med.unsw.edu.au/embryology/index.php/BGDA_Lecture_-_Development_of_the_Embryo/Fetus_1
- © Dr Mark Hill 2024, UNSW Embryology ISBN: 978 0 7334 2609 4 - UNSW CRICOS Provider Code No. 00098G